- Overview
- Product Description
- Product Parameters
- Installation Instructions
- Company Profile
Basic Info.
Model NO.
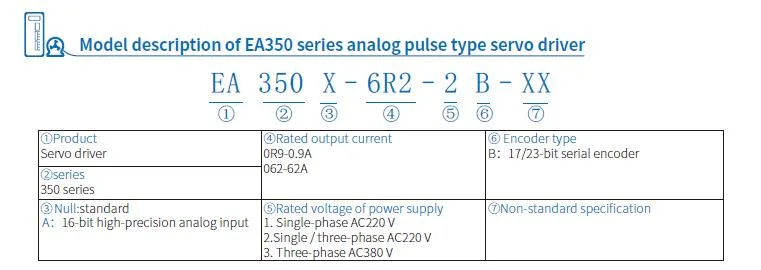
EA350
Signal
Continuous
Function
Automatic Control
Certification
ISO: 9001, CE
Condition
New
Customized
Customized
Material
Aluminum Alloy
Control Method
Svpwm, Vector Control
Cooling Method
Fan Cooling
Communication Function
Modbus RTU
Voltage Range
-10 V ~ 10 V
Command Smoothing Mode
Low-Pass Filtering
Front Panel
5 Keys, 5-Digit LED
Transport Package
Wooding
Trademark
SINEE
Origin
China
Production Capacity
400000sets/Year
Packaging & Delivery
Package Size
30.50cm * 17.50cm * 29.00cm
Package Gross Weight
2.800kg
Product Description
EA350series servo driver
Single-phase 220 V ~ 240 V 0.1~1 kW
Three-phase 220 V ~ 240 V 0.75~1.5 kW
Three-phase 340 V ~ 460 V 1.5~30 kW
•High performance
•High electromagnetic compatibility
•Multi-functional and expansible
•High-precision po sitioning
•Low torque fluc tuation
•Complete specific ations
•Reduced installation sp ace
•High r eliability


Single-phase 220 V ~ 240 V 0.1~1 kW
Three-phase 220 V ~ 240 V 0.75~1.5 kW
Three-phase 340 V ~ 460 V 1.5~30 kW
•High performance
•High electromagnetic compatibility
•Multi-functional and expansible
•High-precision po sitioning
•Low torque fluc tuation
•Complete specific ations
•Reduced installation sp ace
•High r eliability


| Operating conditions | Temperature | Working temperature 0~40° storage temperature -20° ~85° | ||
| Humidity | Working / storage: ≤ 90% RH (without dew condensation) | |||
| Altitude | ≤ 1,000 m | |||
| Vibration | ≤ 4.9 m/s2, 10~60 Hz (no operation at the point of resonance is permitted) | |||
| Cooling method | Fan cooling | |||
| Control method | SVPWM, vector control | |||
| Six control modes | Speed control, position control, torque control, speed / position control, torque / speed control, position /torque control | |||
| Front panel | 5 keys, 5-digit LED | |||
| Regenerative brake | Built-in brake unit (a built-in brake resistor is provided in partial specifications), which can have an external resistor connected | |||
| Feedback mode | RS485 serial communication encoder, RA-CODER or FA-FORMAT protocol (non-standard version of FA-FORMAT is supported) | |||
| Digital input/output | Input | Pulse disable, forward drive disable, reverse drive disable, forward inch, backward inch | ||
| Output | Servo ready, brake output, motor rotation output, zero-speed signal, speed approach, speed reached, position approach, torque limit, rotating speed limit, warning output,alarm output. | |||
| Protective Function Software | Hardware | Over-voltage, under-voltage, over-speed, overheat, overload, over-speed, encoder alarm,and so on. | ||
| Software | Excessively large position error, EEPROM fault, and so on. | |||
| Alarm data tracking function | Record 4 groups of historical alarms and relevant data | |||
| Communication function | Modbus RTU | |||
| Encoder signal output | Signal type | A, B, Z differential outputs, Z signal open-collector output; Z signal width can be set. A/B/Z pulse open-collector output (NPN) | ||
| Resolution | Any frequency division can be programmed and output before or after frequency quadruplication | |||
| Position control mode | Maximum input pulse frequency | Differnetial input mode:500Kpps Open-collector input mode: 200 Kpps | ||
| Pulse command mode | Pulse + symbol, A and B-phase orthogonal pulse, CW/CCW | |||
| Command control mode | External pulse command, multi-segment position command | |||
| Command smoothing mode | Low-pass filtering,FIR filter,trapezoid-shaped smoothing of multi-segment position command | |||
| Electronic gear ratio | Electronic gear ratio: N/M multiples (0.001 < N/M < 64000 = N: 1~230, M: 1 ~230 | |||
| Position accuracy | ±1 pulse command | |||
| Speed control mode | Command control mode | External analog quantity command, digital speed command, multistage speed command, inching command | ||
| Command smoothing mode | Low-pass filtering, smooth S curve | |||
| Analog command input | Voltage range | -10 V ~ 10 V | ||
| Input impedance | 10 KΩ | |||
| Time constant | 200 µs | |||
| Torque limit | Digital setting or external analog quantity limit | |||
| Speed regulation ratio | 1:5000 (23-bit encoder) | Minimal speed/rated rotating speed of continuous stable operation under the rated load | ||
| Bandwidth | 3,000 Hz (23-bit encoder) | |||
| Speed fluctuation ratio | Load fluctuation (0 ~100%) | Maximum 0.1% | For a 23-bit encoder, when the speed command is the rated rotating speed, (rotating speed without load - rotating speed with full load)/rated rotating speed. | |
| Supply voltage change ±10% | Maximum 0.1% | |||
| Ambient tempera- ture (0 ~ 50° C) | Maximum 0.1% | |||
| Torque control mode | Command con - trol mode | External analog command, digital torque command | ||
| Command smoothing mode | Low-pass filtering | |||
| Analog command input | Voltage range | -10 V ~ 10 V | ||
| Input impedance | 10 KΩ | |||
| Time constant | 200 µs | |||
| Speed limit | Digital setting or external analog quantity limit | |||
| Accuracy | ±1% (current repetition accuracy) | |||

